Como Funciona o Sistema Fly-By-Wire?

Segundo o SkyBrary, o Fly-by-Wire (FBW) é o termo geralmente usado para aqueles sistemas de controle de voo que usam computadores para processar as entradas de controle de voo feitas pelo piloto ou piloto automático e enviar sinais elétricos correspondentes aos atuadores da superfície de controle de voo. Este arranjo substitui a ligação mecânica e significa que as entradas do piloto não movem diretamente as superfícies de controle. Em vez disso, as entradas são lidas por um computador que, por sua vez, determina como mover as superfícies de controle para melhor atingir o que o piloto deseja de acordo com qual das Leis de Controle de Voo.
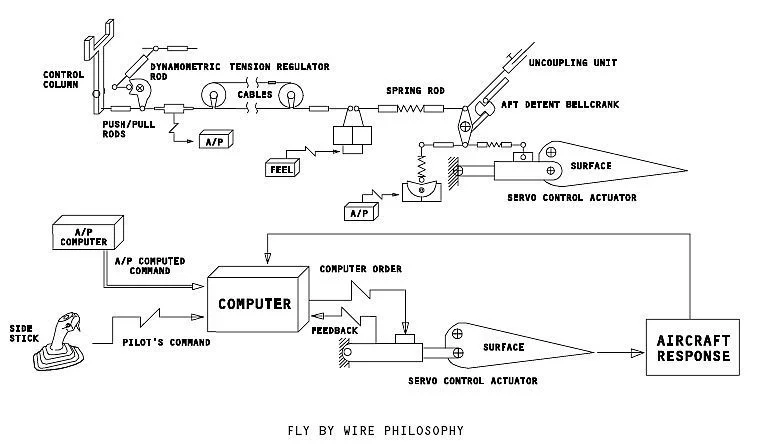
O princípio usado é o de controle de erro no qual a posição de uma superfície de controle (o sinal de saída) é continuamente detectada e “realimentada” para seu computador de controle de voo (FCC). Quando uma entrada de comando é feita pelo piloto ou piloto automático a diferença entre a posição atual da superfície de controle e a posição aparentemente desejada da superfície de controle indicada pelo comando é analisada pelo computador e um sinal corretivo apropriado é enviado eletricamente para a superfície de controle. A compensação de feedback funciona como controle de erro e o FCC regula o sistema comparando sinais de saída com sinais de entrada. Qualquer erro entre os dois se torna um comando para a superfície de controle de voo até que a saída seja igual à entrada.
Em um sistema FBW, a rota do sinal do FCC para a superfície de controle é chamada de caminho direto, enquanto a rota do sinal da superfície de controle para o FCC é chamada de loop ou caminho de feedback. Ganho é a amplificação ou atenuação que é aplicada ao sinal direto para atingir a resposta desejada da aeronave. Um filtro pode ser usado para bloquear o feedback de sinais ou movimento que ocorrem em um intervalo indesejavelmente frequente.
Uma vantagem de um sistema de feedback como esse é que o sistema de controle de voo (FCS) pode ser usado para reduzir a sensibilidade a mudanças nas características básicas de estabilidade da aeronave ou distúrbios externos. O piloto automático, um sistema de aumento de estabilidade (SAS) e um sistema de aumento de controle (CAS) são todos sistemas de controle de feedback.
Em um SAS, uma função de amortecimento é formada no loop de feedback e geralmente tem baixo ganho, ou autoridade, sobre uma superfície de controle. Um CAS é implementado no caminho para frente e representa “direção hidráulica” de alta autoridade, fornecendo resposta consistente em condições de voo amplamente variáveis. Os princípios CAS e SAS foram usados independentemente em aeronaves militares antes do fly-by-wire, integrados a um FCS, eles podem operar com mais precisão e muito mais flexibilidade. A resposta consistente da aeronave é obtida em um amplo envelope de voo por meio de ganhos CAS que são programados como funções de velocidade do ar, mach, posição do centro de gravidade e configuração.
Leis de Controle
Os FCCs no centro de um FCS são programados com leis de controle que governam o sistema de controle de feedback. As leis de controle são comumente nomeadas após o parâmetro de feedback primário como ‘feedback xxx‘ ou ‘comando xxx’. Feedbacks típicos são:
- Canal de passo: fator de carga vertical ‘g’, taxa de passo ‘q’, ângulo de passo ‘θ’, ângulo de ataque ‘α’.
- Canal de rolagem: ângulo de inclinação ‘f’, taxa de rolagem ‘p’.
- Canal de guinada: taxa de guinada ‘r’, ângulo de deslizamento lateral ‘b’, taxa de variação do ângulo de deslizamento lateral ‘b com um ponto sobre ele’ verbalizado como ‘ponto beta’).
‘Comando G’, que é uma capacidade desejável em altas velocidades, significa que para uma quantidade específica de força da coluna de controle, você obtém (se a energia disponível permitir) o mesmo ‘g’ independentemente da velocidade do ar predominante. Similarmente, em um sistema de comando de taxa de passo, você obtém a mesma quantidade de taxa de passo para uma dada força da coluna de controle independentemente da velocidade do ar predominante.
Para equilibrar a necessidade de comunicar comandos do piloto rapidamente, mantendo ao mesmo tempo um contexto para eles como base para precisão ao longo do tempo, o FCC fornece um caminho direto para o elevador através da ‘linha proporcional’ ou ‘ganho de avanço de alimentação’, mas também encaminha o mesmo comando através de um circuito paralelo ‘integrador’ que produz um comando de superfície de controle até que o sinal de feedback seja igual ao sinal de comando original do piloto. Os engenheiros devem ‘ajustar’ a configuração de ganho do integrador para evitar atraso excessivo.
Controle integrador puro, ou muito ganho integrador ‘K’ causaria atraso excessivo na resposta da aeronave, razão pela qual a linha proporcional também é usada. Esse arranjo, chamado de controle “proporcional mais integral”, é encontrado na maioria dos projetos fly-by-wire, incluindo os da Boeing e da Airbus.
Se houver atraso indevido em um FCS, causando atraso na mudança de direção, digamos, de nariz para cima para nariz para baixo, o efeito seria análogo ao atraso no desempenho humano, conhecido como oscilação induzida pelo piloto ou PIO.
Uma aeronave controlada em pitch pelo comando pitch-rate ou comando ‘g’ fornece a atitude de espera com controles livres, semelhante ao recurso de direção do volante de controle (CWS) de um piloto automático. Caso altere a atitude de pitch e liberar a pressão de controle na atitude desejada, o sistema mantém essa nova atitude porque o FCS reage para trazer a taxa de pitch para zero. A aeronave deve voar facilmente com apenas forças de controle moderadas necessárias e controle de atitude preciso. Um benefício consequente do pitch-rate ou do feedback g é o ajuste automático, pois você pode alterar a velocidade sem precisar ajustar novamente para voo nivelado. O mesmo se aplica a mudanças de empuxo ou configuração, pois o ajuste automático fornece estabilidade aparente em velocidade neutra. Embora a estabilidade de velocidade positiva fosse um requisito de projeto geralmente aceito para aeronaves controladas convencionalmente, a falta dela parece ser aceitável para aqueles que voam aeronaves FBW com esse efeito não moderado. Alguns tipos de FBW, no entanto, mantêm a “sensação” de ajuste convencional.
Uma lei de controle comum que mistura ‘g’ e feedback de taxa de inclinação é chamada C* (verbalizada como estrela C). Em baixa velocidade em um avião C*, a taxa de inclinação se aplica, enquanto em velocidades mais altas, ‘g’ se aplica. A mudança é transparente e ocorre, por exemplo, a cerca de 210 nós em aeronaves da série Airbus A320. A Boeing fez uso de uma lei de controle C* modificada chamada C*U, onde ‘U’ representa a velocidade de avanço da aeronave e que fornece estabilidade de velocidade aparente. Isso funciona fazendo com que os interruptores de compensação definam uma velocidade de referência que é somada à velocidade real no loop de feedback do FCC de tal forma que o piloto sinta as indicações convencionais da força de controle conforme a velocidade muda. Se “ajusta uma velocidade”, não a superfície de controle de inclinação. Como a velocidade máxima de referência de compensação é de 330 nós, um piloto teria que empurrar o volante de controle para aumentar ainda mais a velocidade em direção ao Vmo, o que convenientemente fornece uma dica tátil de alta velocidade.
Analisando mais detalhadamente as fases específicas do voo, o FBW permite que os projetistas otimizem a dinâmica efetiva para diferentes fases do voo, introduzindo, por exemplo, um modo de aproximação ou um modo de flare e criando um FCS multimodo.
Tanto na série Airbus A320 quanto no Boeing 777, as leis de controle não estão totalmente ativas até que a aeronave esteja no ar porque os sensores usados para feedback detectariam muita vibração e “ruído” durante a decolagem. O pouso requer outras transições. Como levar em conta o efeito solo é um fator “único” na execução de um pouso bem sucedido, a lei de controle vigente pode precisar de “compensação de alargamento” para garantir que o movimento usual da coluna de controle para trás seja necessário para alargar. No caso da lei de controle C* no Boeing 777, um comando artificial de inclinação do nariz para baixo é inserido a 30 pés de rádio para essa finalidade. As leis de controle do Boeing 777 também foram usadas para melhorar as características de ‘desrotação’ em comparação com as do Boeing 757 e 767 , ajustando o ganho do integrador C*U durante os testes de voo.
Em vez de fornecer um FCS convencional para backup, a abordagem com aeronaves comerciais normalmente controladas totalmente por FBW é fornecer redundância para os FCCs e sensores instalando mais deles. O projeto de FBW de aeronaves civis geralmente emprega FCSs triplex, como é o caso do Boeing 777 e do Airbus A340, ambos também têm backup mecânico limitado para permitir um período de “sobrevivência” em cruzeiro para resolver quaisquer problemas elétricos. Qualquer sistema FBW duplex deve ter um backup mecânico completo.
Quando todos os componentes estão operacionais, um FCS é comumente dito estar operando em lei normal. Falhas limitadas geralmente causam reversão automática para algum modo FCS degradado, mas ainda computado. O nível mais baixo do modo de backup FBW normalmente apresenta sinais eletrônicos analógicos que ignoram os FCCs e vão diretamente para os atuadores de controle de voo – Lei Direta. Sob a Lei Direta, não há controle de feedback e pode haver ganhos fixos visando fornecer forças de controle aceitáveis proporcionais à deflexão da superfície de controle. O ganho selecionado pode otimizar as forças de controle para a configuração de pouso, ou pode fornecer ganhos diferentes para cruzeiro e pouso, comutados, por exemplo, através do seletor de flap.
O controle de feedback de velocidade do ar, Número Mach, atitude e ângulo de ataque pode ser usado para garantir que a aeronave FBW permaneça dentro de seu envelope de voo certificado. Duas estratégias foram usadas para atingir isso: a estratégia da Airbus de ‘limites rígidos’ em que as leis de controle têm controle de autoridade absoluta, a menos que o piloto selecione Lei Direta; ou a estratégia da Boeing de ‘limites suaves’ em que o piloto pode anular a Proteção do Envelope de Voo e, assim, retém o controle final sobre a operação da aeronave.
Conclusão
As vantagens de peso reduzido, confiabilidade aprimorada, tolerância a danos e controle mais eficaz de uma aeronave necessariamente altamente manobrável foram reconhecidas pela primeira vez no projeto de aeronaves militares. A primeira aeronave a ter FBW para todos os seus controles de voo no lugar de operação mecânica direta ou assistida hidraulicamente foi o F-16 em 1973. No contexto da necessidade de agilidade dos jatos rápidos militares e, portanto, aeronaves relativamente mais instáveis, o FBW fornece a capacidade de garantir que aumentos não intencionais no ângulo de ataque ou deslizamento lateral sejam detectados e rapidamente, e automaticamente, resolvidos ao desviar marginalmente as superfícies de controle na direção oposta enquanto o problema ainda é pequeno. O FBW também permite sistemas de proteção de envelope de voo altamente confiáveis que, desde que o sistema FBW funcione em seu nível normal, aumenta significativamente a segurança, a economia de combustível e as respostas de todo o sistema.